意大利AMISCO阿米斯科電磁閥防爆線圈3009MD024W3 3009MA220W2
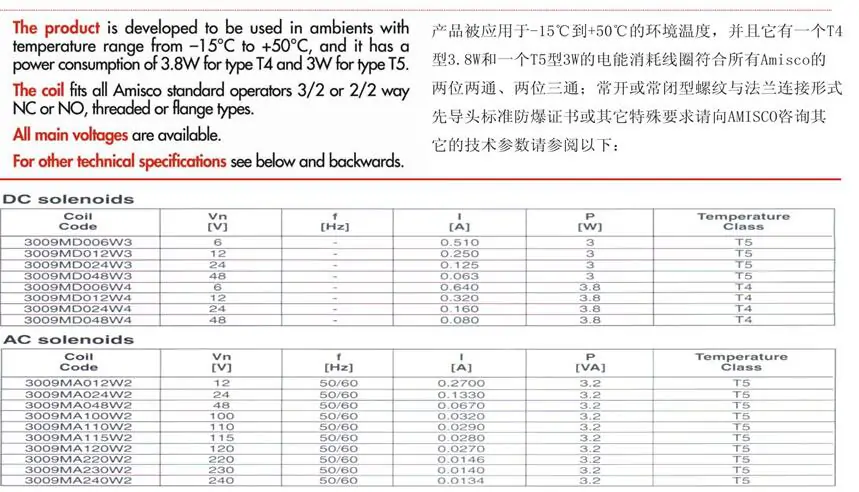
3009MA012W2,3009MA024W2,3009MA048W2,3009MA100W2,3009MA110W2,3009MA115W2
3009MA120W2,3009MA220W2,3009MA230W2,3009MA240W2,3009MD006W3,3009MD006W4
3009MD012W3,3009MD012W4,3009MD024W3,3009MD024W4,3009MD048W3,3009MD048W4
3009MD024W3,
30XDMD024W300,
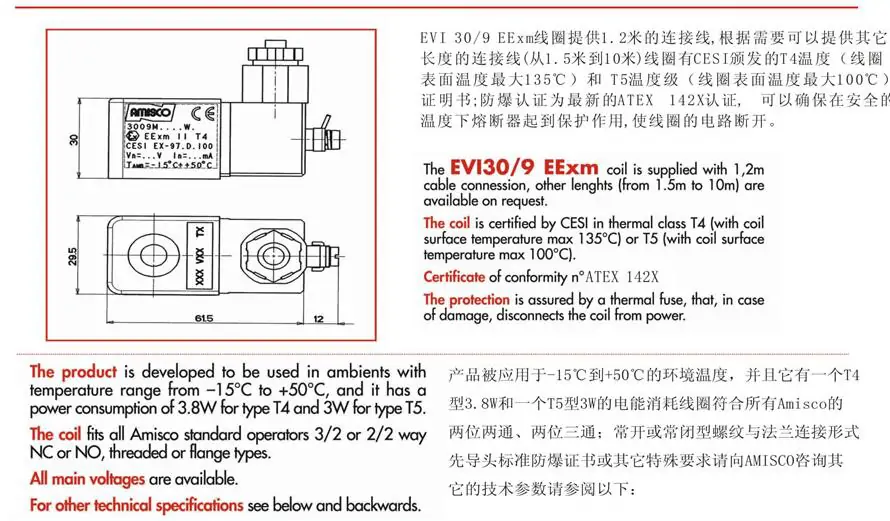
EVI30/10,EVI30/8,EVI30/9,EVI3E/16,EVI3P/13
EVI5E/13,EVI5M/13,EVI5P/13,EVI5S13
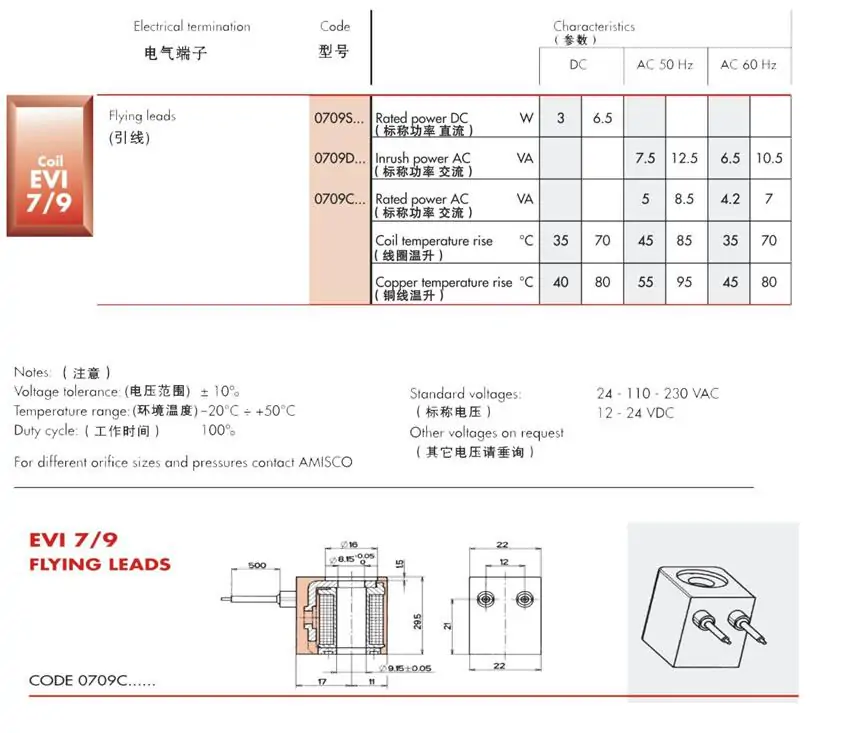
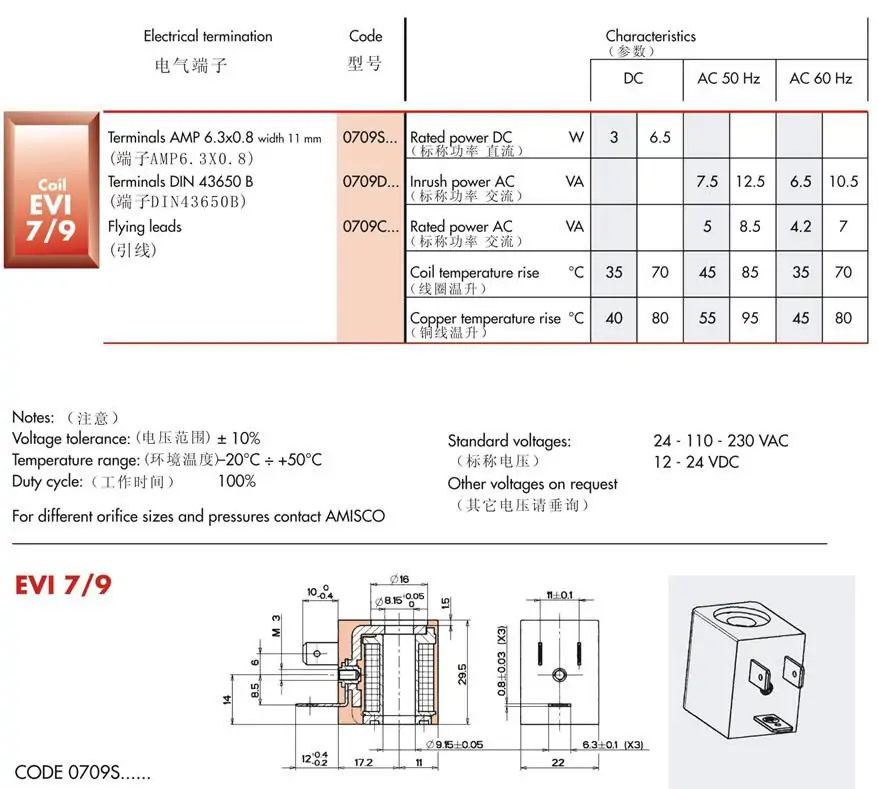
EVI7/10,EVI7/8,evI7/9,EVI7S8,EVI7S9
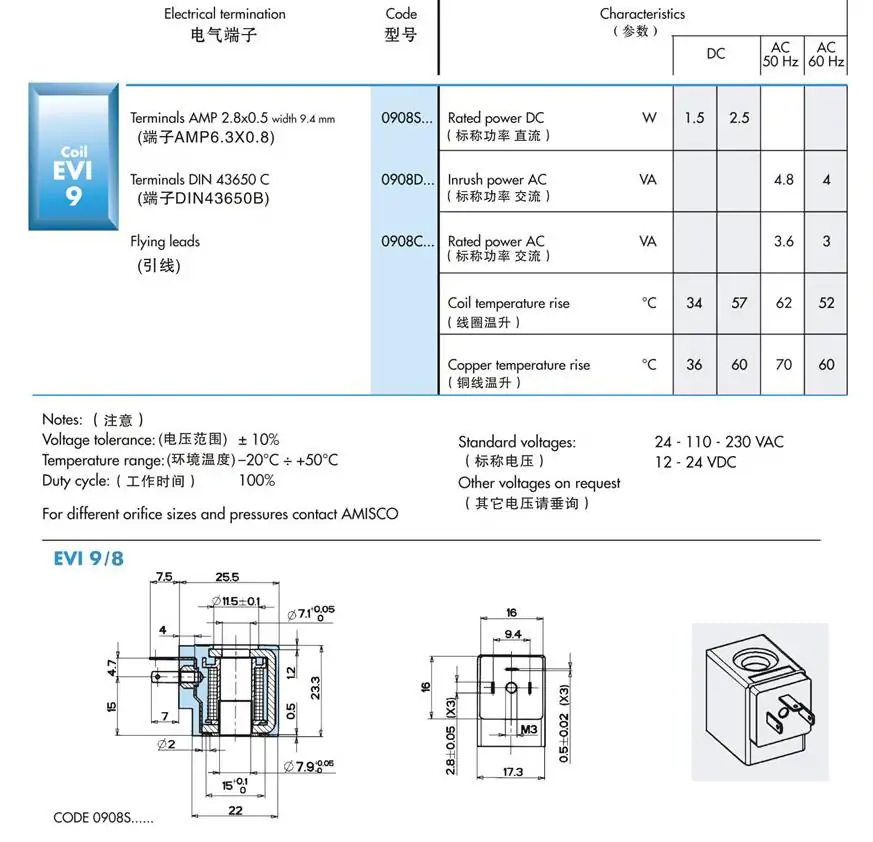
EVI9,EVI9/8,EVI9S
EVI7/9 AC220V AMISCO 6VA 帶燈 交流電
EVI7/9 AC24V AMISCO 5VA 帶燈 交流電
EVI7/9 DC24V AMISCO 3W 帶燈 直流電
EVI7/9 DC24V AMISCO 4.8W
AMISCO EVI7/9 AC220V 6VA 交流電
AMISCO EVI7/9 AC24V 5VA 交流電
AMISCO EVI7/9 DC24V 3W 直流電
AMISCO EVI7/9 DC24V 4.8W
EVI7/9AC110V無接線盒 AC110V交流電壓
EVI7/9AC110V+透明帶燈接線盒 AC110V交流電壓
EVI7/9AC110V+OMAL黑接線盒 AC110V交流電壓
EVI7/9AC110V+AMISCO接線盒 AC110V交流電壓
EVI7/9DC110V無接線盒 DC110V直流電壓
EVI7/9DC110V+AMISCO接線盒 DC110V直流電壓
EVI7/9AC24V無接線盒 AC24V交流電壓
EVI7/9AC24V+AMISCO接線盒 AC24V交流電壓
EVI3E14/DC24V單獨線圈無接線盒 內孔14mm高50mm
EVI3E14/DC24V線圈+接線盒 內孔14mm高50mm
EVI3E14/AC220V單獨線圈無接線盒 內孔14mm高50mm
EVI3E14/AC220V線圈+配接線盒 內孔14mm高50mm
伺服系統技術要求及有關參數
伺服進給系統的要求
1、調速范圍寬
2、定位精度高
3、有足夠的傳動剛性和高的速度穩定性
4、快速響應,無超調。
5、低速大轉矩,過載能力強。一般來說,伺服驅動器具有數分鐘甚至半小時內1.5倍以上的過載能力,在短時間內可以過載4~6倍而不損壞。
6、可靠性高。要求數控機床的進給驅動系統可靠性高、工作穩定性好,具有較強的溫度、濕度、振動等環境適應能力和很強的抗干擾的能力。
對電機的要求
1、從最低速到最高速電機都能平穩運轉,轉矩波動要小,尤其在低速如0.1r/min或更低速時,仍有平穩的速度而無爬行現象。
2、電機應具有大的較長時間的過載能力,以滿足低速大轉矩的要求。一般直流伺服電機要求在數分鐘內過載4~6倍而不損壞。
3、為了滿足快速響應的要求,電機應有較小的轉動慣量和大的堵轉轉矩,并具有盡可能小的時間常數和啟動電壓。
4、電機應能承受頻繁啟、制動和反轉。
伺服放大器的有關參數
位置比例增益
1、設定位置環調節器的比例增益;
2、設置值越大,增益越高,剛度越大,相同頻率指令脈沖條件下,位置滯后量越小。但數值太大可能會引起振蕩或超調;
3、參數數值由具體的伺服系統型號和負載情況確定。
位置前饋增益
1、設定位置環的前饋增益;
2、設定值越大時,表示在任何頻率的指令脈沖下,位置滯后量越小;
3、位置環的前饋增益大,液壓伺服控制系統的高速響應特性提高,但會使系統的位置不穩定,容易產生振蕩;
4、不需要很高的響應特性時,本參數通常設為0表示范圍:0~100%。

速度比例增益
1、設定速度調節器的比例增益;
2、設置值越大,增益越高,剛度越大。參數數值根據具體的伺服驅動系統型號和負載值情況確定。一般情況下,負載慣量越大,設定值越大;
3、在系統不產生振蕩的條件下,盡量設定較大的值。
速度積分時間常數
1、設定速度調節器的積分時間常數;
2、設置值越小,積分速度越快。參數數值根據具體的伺服驅動系統型號和負載情況確定。一般情況下,負載慣量越大,設定值越大;
3、在系統不產生振蕩的條件下,盡量設定較小的值。
速度反饋濾波因子
1、設定速度反饋低通濾波器特性;
2、數值越大,截止頻率越低,電機產生的噪音越小。如果負載慣量很大,可以適當減小設定值。數值太大,造成響應變慢,可能會引起振蕩;
3、數值越小,截止頻率越高,速度反饋響應越快。
最大輸出轉矩設置
1、設置伺服電機的內部轉矩限制值;
2、設置值是額定轉矩的百分比;
3、任何時候,這個限制都有效定位完成范圍;
4、設定位置控制方式下定位完成脈沖范圍;
5、本參數提供了位置控制方式下驅動器判斷是否完成定位的依據,當位置偏差計數器內的剩余脈沖數小于或等于本參數設定值時,驅動器認為定位已完成,到位開關信號為 ON,否則為OFF;
6、在位置控制方式時,輸出位置定位完成信號,加減速時間常數;
7、設置值是表示電機從0~2000r/min的加速時間或從2000~0r/min的減速時間;
8、加減速特性是線性的到達速度范圍;
9、設置到達速度;
10、在非位置控制方式下,如果電機速度超過本設定值,則速度到達開關信號為ON,否則為OFF;
11、在位置控制方式下,不用此參數;
12、與旋轉方向無關。
本文由蘇州逐利機電整理發布,如需轉載請瀏覽來源及出處,原文地址:http://www.mfchsuyu.cn/xq/530.html







留言信息